жңәеҷЁдәә|еҘ—дёҠиҝҷдёӘеЈіпјҢжүӢжңәиҮӘе·ұвҖңи·‘жӯҘвҖқеҺ»е……з”ө
_еҺҹйўҳдёә еҘ—дёҠиҝҷдёӘеЈі пјҢ жүӢжңәиҮӘе·ұвҖңи·‘жӯҘвҖқеҺ»е……з”ө
иҙҫжө©жҘ еҸ‘иҮӘ еҮ№йқһеҜә
йҮҸеӯҗдҪҚ жҠҘйҒ“ | е…¬дј—еҸ· QbitAI
гҖҗжңәеҷЁдәә|еҘ—дёҠиҝҷдёӘеЈіпјҢжүӢжңәиҮӘе·ұвҖңи·‘жӯҘвҖқеҺ»е……з”өгҖ‘е‘Ёжң«еҘҪдёҚе®№жҳ“дј‘жҒҜ пјҢ зҳ«еңЁеәҠдёҠзҡ„дҪ иҝһз»ҷжүӢжңәе……з”өйғҪжҮ’еҫ—еҠЁвҖҰвҖҰ

ж–Үз« еӣҫзүҮ
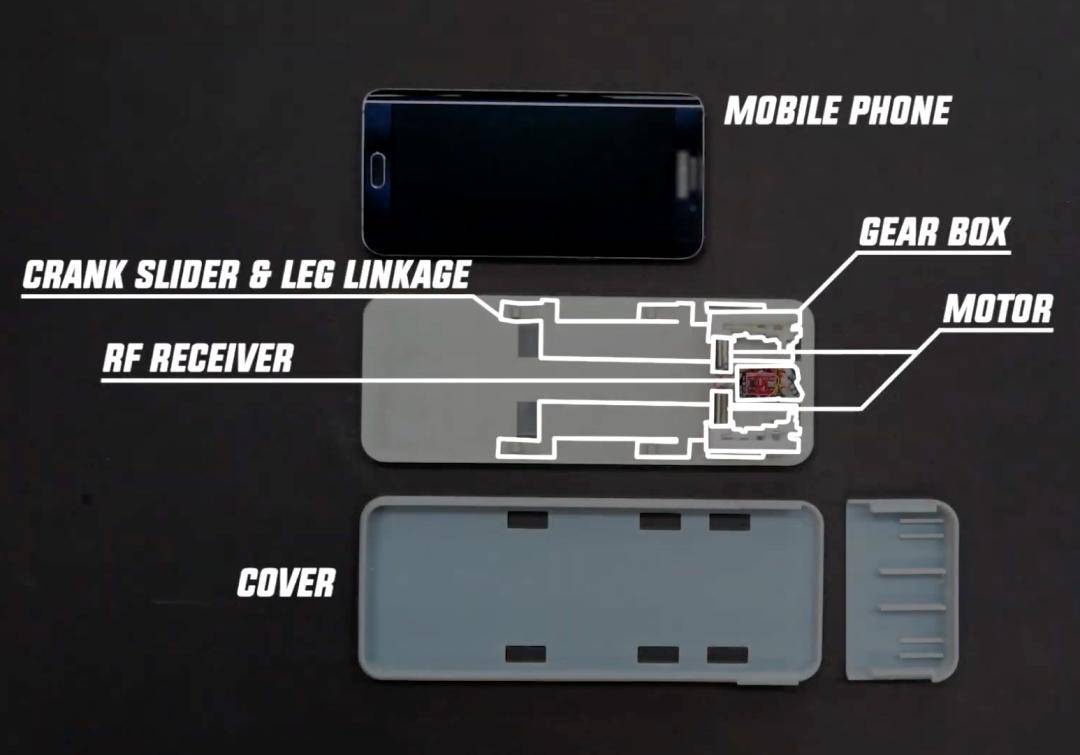
еҸҜд»Ҙж»Ўи¶ідҪ пјҒйҰ–е°”еӣҪз«ӢеӨ§еӯҰз”ҹзү©жңәеҷЁдәәе®һйӘҢе®ӨејҖеҸ‘еҮәдәҶвҖңиҝӣеҮ»зҡ„жүӢжңәеЈівҖқCaseCrawler пјҢ еёҰжңү6дёӘжңәжў°и…ҝ пјҢ еҸҜд»ҘвҖңдёҖи·Ҝе°Ҹи·‘вҖқеҲ°ж— зәҝе……з”өи®ҫж–Ҫж—Ғиҫ№ пјҢ е……з”өе®ҢжҲҗеҗҺеҶҚи·‘еӣһдҪ зҡ„иә«иҫ№ гҖӮ

ж–Үз« еӣҫзүҮ
жүӢжңәеЈіеә•дёӢеёҰжңү6дёӘвҖңе°Ҹзҹӯи…ҝвҖқ пјҢ и·‘иө·жқҘзҡ„ж‘ҶеҠЁйў‘зҺҮеҫҲй«ҳпјҡ
ж–Үз« еӣҫзүҮ
иҝҷдёӘе°ҸдёңиҘҝвҖңи…ҝй•ҝвҖқ1.6cm пјҢ еҸҜд»ҘиҪ»жқҫзҲ¬дёҠе’ҢиҮӘе·ұзҡ„и…ҝдёҖж ·й«ҳзҡ„йҡңзўҚзү©пјҡ
ж–Үз« еӣҫзүҮ
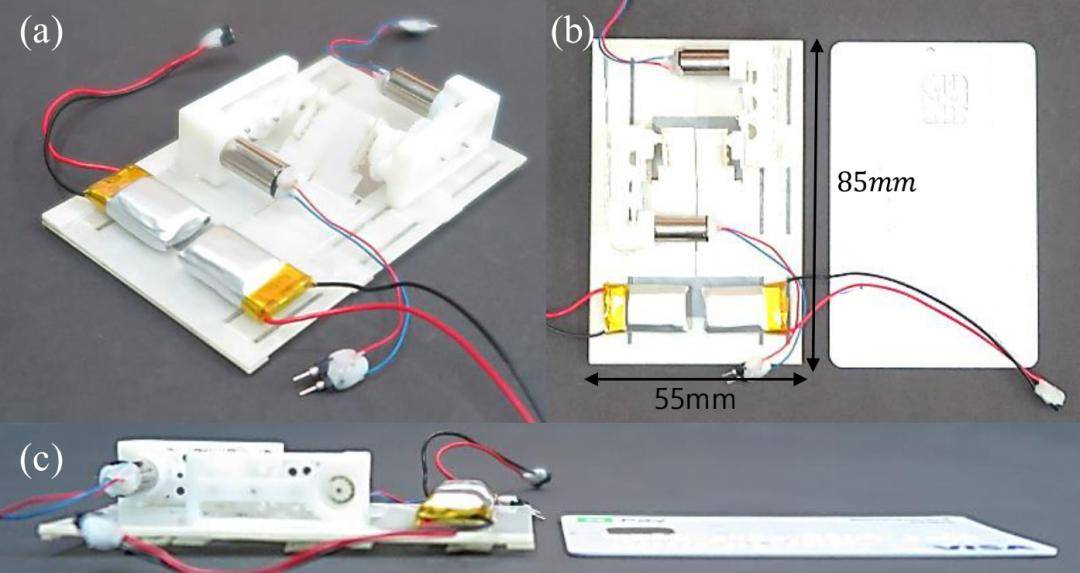
ж•ҙдёӘе°ҸжңәеҷЁдәәжІЎжңүиЈ…еҲ°жүӢжңәеЈідёҠж—¶иҮӘйҮҚзәҰ23е…Ӣ пјҢ еңЁиҙҹйҮҚ300е…ӢпјҲиҮӘйҮҚзҡ„13еҖҚпјүзҡ„жғ…еҶөдёӢ пјҢ иҝҳиғҪд»ҘжҜҸз§’21cmзҡ„йҖҹеәҰеүҚиҝӣпјҡ
ж–Үз« еӣҫзүҮ
дёҚе…үиғҪиғҪиҮӘе·ұи·‘еҺ»е……з”ө пјҢ еӣһжқҘж—¶иҝҳиғҪйЎәжүӢеё®дҪ жҚҺе’–е•ЎйҘје№І пјҢ зңҹзҡ„жҳҜзңҒеҝғеҸҲиҙҙеҝғзҡ„з”ҹжҙ»е°ҸеҠ©жүӢ гҖӮ
жүҖд»ҘиҜҙ пјҢ дәәзұ»зҡ„жҮ’жғ°жүҚжҳҜ科жҠҖеӯҰжҠҖжңҜиҝӣжӯҘзҡ„第дёҖй©ұеҠЁеҠӣ гҖӮ
иҝҷеҸҘиҜқдёҖзӮ№жІЎй”ҷ гҖӮ
иҝӣеҮ»зҡ„жүӢжңәеЈі
еёҰжңүжңәжў°и…ҝиғҪеӨҹиҮӘиЎҢеүҚиҝӣзҡ„еҫ®еһӢжңәеҷЁдәәе…¶е®һ并дёҚзҪ•и§Ғ пјҢ еҫҲеӨҡеӣўйҳҹйғҪејҖеҸ‘еҮәдәҶзӣёеә”дә§е“Ғ гҖӮ дҪҶиҝҷдәӣжңәеҷЁдәәж•ҙдҪ“з»“жһ„жҳҜдёҚ规еҲҷзҡ„ пјҢ ж— жі•ж•ҙеҗҲиҝӣдёҖдёӘжүӢжңәеЈідёӯ гҖӮ
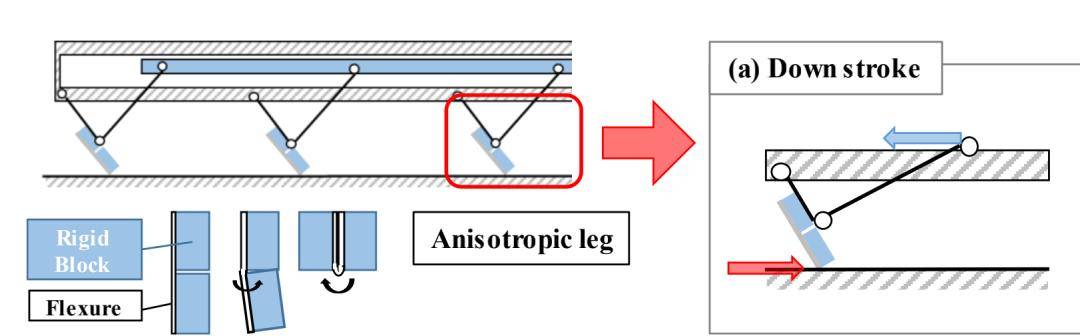
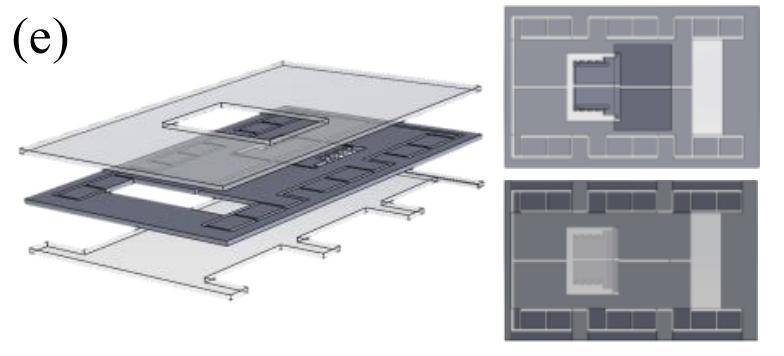
CaseCrawlerзҡ„жҠҖжңҜжңҖеӨ§зҡ„дә®зӮ№еңЁдәҺе®ғзҡ„жңәжў°и…ҝ пјҢ еңЁйқҷжӯўж—¶еҸҜд»Ҙдјёеұ•ж”ҫе№і пјҢ д»ҺеҸҳйҖҹз®ұеҗ‘и…ҝйғЁдј йҖҒеҠЁеҠӣзҡ„йҪҝиҪ®з»„еҺҡеәҰеҸӘжңү1.5жҜ«зұі пјҢ дҪҶиҪ»и–„зҡ„жңәжў°з»“жһ„еҚҙзӣёеҪ“з»“е®һ гҖӮ
ж–Үз« еӣҫзүҮ
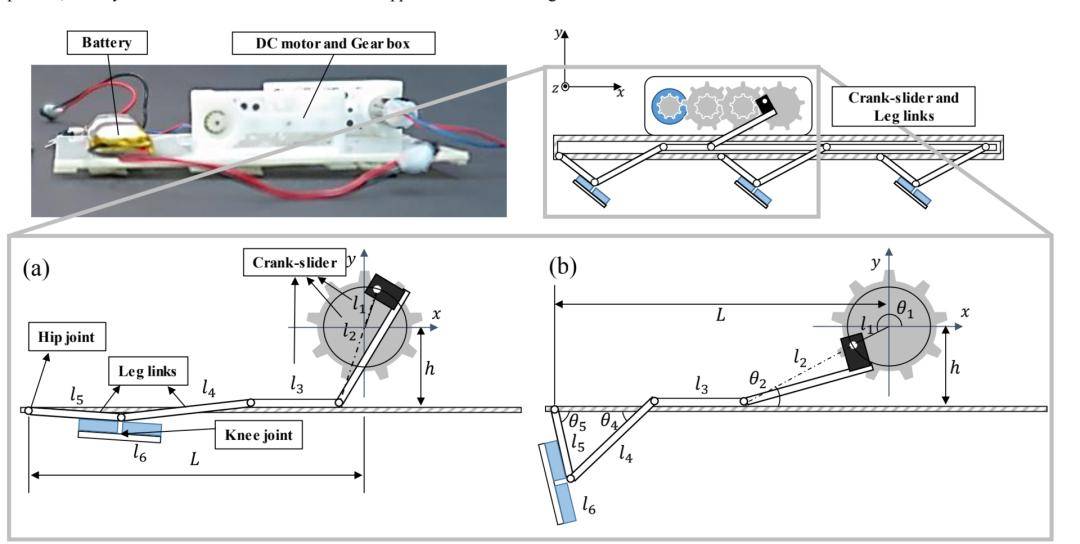
жңәжў°и…ҝе·ҘдҪңеҺҹзҗҶи·ҹдәәзұ»зҡ„и…ҝе·®дёҚеӨҡ пјҢ жңүдёҖдёӘиҶқе…іиҠӮеҚ•еҗ‘еҗ‘еүҚејҜжӣІ пјҢ дёҖз»„еӨҡиҝһжқҶпјҲйҖҡиҝҮеҸҳйҖҹз®ұйҪҝиҪ®з®ұиҝһжҺҘеҲ°з”өжңәдёҠпјүе°Ҷи…ҝйғЁжҺЁеҗ‘ең°йқў гҖӮ
е…ій”®и®ҫи®ЎжҳҜз”ұжӣІжҹ„ж»‘еқ—жңәжһ„е’ҢеҸҜдјёеұ•ж”¶зј©зҡ„и…ҝйғЁе…іиҠӮдёҺеҗ„еҗ‘ејӮжҖ§зҡ„зқҖең°и…ҝ пјҢ з»„жҲҗзҡ„з®ҖеҢ–иҝҗеҠЁй“ҫ гҖӮ
иҝһжҺҘеңЁи…ҝйғЁе…іиҠӮдёҠзҡ„еҗ„еҗ‘ејӮжҖ§и…ҝеҸӘеңЁеүҚиЎҢпјҲеҗ‘дёӢз”ЁеҠӣпјүж—¶еҗ‘ең°йқўдј еҠӣпјӣеңЁдёҠиЎҢж—¶иҶқе…іиҠӮиў«еҠЁејҜжӣІ пјҢ йҒҝе…Қеҗ‘еҗҺеҸ‘еҠӣ гҖӮ
ж–Үз« еӣҫзүҮ
иҝҗеҠЁй“ҫзҡ„дёҖйғЁеҲҶдёәжӣІжҹ„ж»‘еқ—жңәжһ„ пјҢ е°Ҷз”өжңәзҡ„жүӯзҹ©дј йҖ’з»ҷе…¶дҪҷйғЁеҲҶ гҖӮ еӣ жӯӨ пјҢ еңЁйҮҚеӨҚдјёй•ҝе’Ңзј©еӣһзҡ„еҗҢж—¶ пјҢ е®һзҺ°дәҶе…¶дҪҷйғЁеҲҶзҡ„ж‘ҶеҠЁиҝҗеҠЁ гҖӮ
жӯӨеӨ– пјҢ и®ҫи®Ўзҡ„иҝҗеҠЁй“ҫеңЁдёҖдёӘж•ҙдҪ“е№ійқўеҶ…иҝҗеҠЁ пјҢ йҖҡиҝҮжңҖеӨ§йҷҗеәҰең°еҮҸе°‘е…іиҠӮзҡ„жЁӘеҗ‘еҸҳеҪў пјҢ е®һзҺ°дәҶй«ҳж•ҲиҪҪиҚ·иғҪеҠӣ гҖӮ
жңәеҷЁдәәеҢ…еҗ«дёӨеҸ°з”өжңәпјҲMK07-1.7 пјҢ DIDELпјүпјӣжҜҸеҸ°з”өжңәиҙҹиҙЈй©ұеҠЁжңәеҷЁдәәдёӨдҫ§зҡ„ж”Ҝи…ҝ пјҢ дёӨдёӘз”өжңәзҡ„иҪ¬йҖҹе·®е®һзҺ°дәҶжңәеҷЁдәәзҡ„иҪ¬еҗ‘ гҖӮ
ж–Үз« еӣҫзүҮ
дёүдёӘ3:1зҡ„е°ҸйҪҝиҪ®дёІиҒ”ж”ҫзҪ® пјҢ дҪҝй«ҳеәҰйҷҚеҲ°жңҖдҪҺ пјҢ еӣ жӯӨйҪҝиҪ®жҜ”дёә27:1 гҖӮ жңәиә«йҮҮз”ЁSCMе·Ҙиүә пјҢ е°ҪйҮҸйҷҚдҪҺй«ҳеәҰ пјҢ 并еңЁдёҠйқўй“әи®ҫе®үиЈ…иҝҗеҠЁй“ҫзҡ„жІҹж§Ҫ гҖӮ
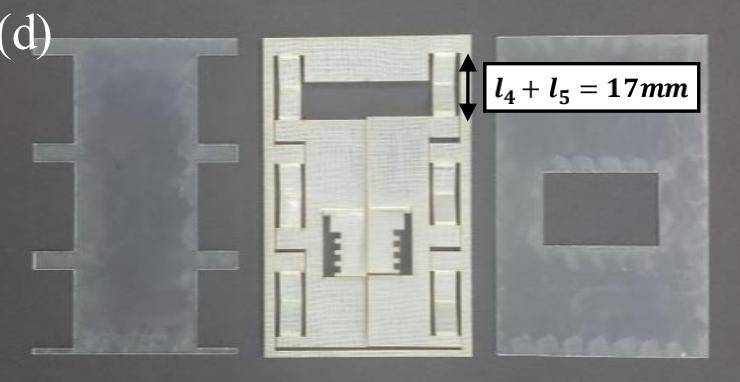
иҝҗеҠЁй“ҫз”ұжӣІжҹ„ж»‘еқ—е’Ңж”Ҝи…ҝй“ҫз»„жҲҗ пјҢ з”ЁдәҺе°Ҷз”өжңәзҡ„жүӯзҹ©дј йҖ’з»ҷеҗ„еҗ‘ејӮжҖ§зҡ„ж”Ҝи…ҝ гҖӮ жӣІжҹ„ж»‘еқ—е’ҢеҸҜеұ•ејҖзҡ„и„ҡй“ҫз”ұPET(0.25T)е’Ңз»Үзү©з»„жҲҗзҡ„еҚ•еұӮжқҝеҲ¶йҖ гҖӮ
ж–Үз« еӣҫзүҮ
ж»‘еқ—е ҶеҸ еңЁдёӨдёӘе№іиЎҢзҡ„е№ійқўд№Ӣй—ҙ пјҢ дҪңдёәж»‘еқ—зҡ„зәҝжҖ§еҜјиҪЁпјӣиҝҷдәӣеҜјиҪЁдә§з”ҹе№іж»‘иҝҗеҠЁ гҖӮ еӣ жӯӨ пјҢ еңЁе®Ңе…Ёзј©еӣһзҡ„зҠ¶жҖҒдёӢ пјҢ еҪўжҲҗдёҖдёӘеҺҡеәҰдёә1.5жҜ«зұізҡ„е№іжқҝдҪ“(дёҚеҗ«йҪҝиҪ®з®ұ) гҖӮ
ж–Үз« еӣҫзүҮ
й“ҫиҠӮзҡ„и®ҫи®Ўж»Ўи¶іиҝҗеҠЁеӯҰзәҰжқҹ пјҢ иҰҒжұӮе…іиҠӮзҡ„иҝҗеҠЁиҢғеӣҙ(ROM)дёә0еҲ°90еәҰ гҖӮ жңҖе°Ҹи§’еәҰи®ҫзҪ®дёә0еәҰ пјҢ дҝқжҢҒеңЁеҲқе§ӢзҠ¶жҖҒдёӢзҡ„зҙ§еҮ‘пјӣжңҖеӨ§и§’еәҰи®ҫзҪ®дёә90еәҰ пјҢ йҳІжӯўз»“жһ„иў«з ҙеқҸ гҖӮ
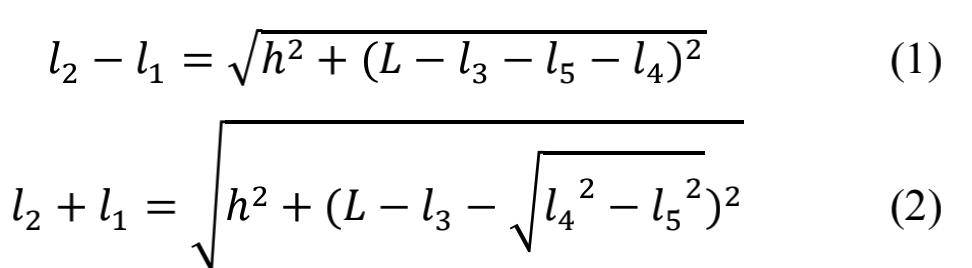
жӣІжҹ„ж»‘еқ—е’Ңи…ҝйғЁй“ҫжҺҘжҳҜиҖҰеҗҲзҡ„ пјҢ еӣ жӯӨ пјҢ е®ғ们еә”иҜҘиў«дёҖиө·и®Ўз®— гҖӮ з”ұе…іиҠӮи§’зҡ„дёӨдёӘиҝңз«ҜжқЎд»¶ пјҢ иҝҗеҠЁеӯҰзәҰжқҹеҸҜеҶҷжҲҗпјҡ
ж–Үз« еӣҫзүҮ
е…¶дёӯеҸҳйҮҸl1иЎЁзӨәжӣІжҹ„иҝһжқҶж»‘еқ—зҡ„й•ҝеәҰ гҖӮ ,l2жҳҜиҝһжқҶй•ҝеәҰ пјҢ l3жҳҜж»‘жқҶй•ҝеәҰ пјҢ l4гҖҒl5жҳҜи…ҝйғЁй“ҫжҺҘиЈ…зҪ®зҡ„й«ҳеәҰ пјҢ hжҳҜжңәдҪ“й«ҳеәҰ пјҢ LжҳҜиҫ“е…ҘйҪҝиҪ®е’Ңе…іиҠӮд№Ӣй—ҙзҡ„й•ҝеәҰ гҖӮ
жҺЁиҚҗйҳ…иҜ»













- |гҖҠжҲ‘зҡ„еҘіеҸӢжҳҜжңәеҷЁдәәгҖӢйҰ–жӣқиҠұзө®пјҢиҫӣиҠ·и•ҫеҢ…иҙқе°”жҗһжҖӘ
- з”өеҪұ|жҚ§еҮәеӨҡдҪҚеҪұеҗҺпјҢеҸҲжӣҫиў«йҖҗеҮәз”өеҪұиҠӮпјҢиҝҷдёӘеҜјжј”жүҚеҚҺжЁӘжәўеҚҙеӨҮеҸ—дәүи®®
- вҖңеә”жЈҖе°ҪжЈҖпјҒвҖқ дё–еҚ«з»„з»ҮдёәдҪ•еҗ‘зҫҺеӣҪеҸ‘еҮәиҝҷдёӘиӯҰе‘Ҡ
- жңәеҷЁдәә|AIи®ӯз»ғеёҲи®©жңәеҷЁдәәжӣҙиҒӘжҳҺ
- ж–°ж”ҝеҮәеҸ°пјҒдҪ зҡ„вҖңеҝ«йҖ’вҖқеҸҜиғҪиҰҒеҸҳдәҶпјҢиҝҷдёӘиЎҢдёҡвҖңд№ҳйЈҺиө·йЈһвҖқпјҒ5е№ҙеҶ…жңүжңӣзӘҒз ҙ1000дәҝе…ғзҡ„еӨ§еёӮеңә
- еҘ¶еҘ¶|еЁғи·ҹзқҖеҰҲеҰҲдёҚй•ҝдёӘпјҢеҘ¶еҘ¶еёҰеҚҙзҢӣй•ҝпјҢеҢ»з”ҹпјҡиҝҷдёӘй”ҷиҜҜеҫҲеӨҡ家й•ҝйғҪеңЁзҠҜ
- жі•еҲ¶|дёәиөҢеҚҡзҪ‘з«ҷжҸҗдҫӣиө„йҮ‘з»“з®—е№іеҸ°пјҢз„ҰдҪңиҝҷдёӘеӣўдјҷж ҪдәҶпјҒ
- зҪ‘з»ңиөҢеҚҡ|иҝҷдёӘжіЁеҶҢдјҡе‘ҳиҫҫ120дёҮдәәзҡ„зҪ‘з»ңиөҢеҚҡе№іеҸ°пјҢиў«иӯҰж–№жү“жҺүпјҒ
- жөҷжұҹиҝҷдёӘе°ҸеұұеқЎ,з«ҹеҸ‘зҺ°28еә§еҸӨеў“вҖҰ
- иҝҷдёӘдәӢпјҢдёҖзӮ№йғҪдёҚиғҪй”ҷпјҒ