зұ»вҖ”иҒҢиҙЈвҖ”еҚҸдҪңиҖ…е»әжЁЎ( дәҢ )
5.йҖӮеҗҲж—¶ пјҢ иҒҢиҙЈеә”з”ұзӣёе…ізұ»е…ұдә« гҖӮ еҫҲеӨҡжғ…еҶөдёӢ пјҢ еҗ„з§Қзӣёе…іеҜ№иұЎеҝ…йЎ»еңЁеҗҢдёҖж—¶й—ҙеұ•зӨәеҗҢж ·зҡ„иЎҢдёә гҖӮ дҫӢеҰӮ пјҢ иҖғиҷ‘дёҖдёӘи§Ҷйў‘жёёжҲҸ пјҢ еҝ…йЎ»жҳҫзӨәеҰӮдёӢзұ»:PlayerгҖҒPlayerBody .PlayerArmsгҖҒPlayerLegsе’ҢPlayerHead гҖӮ жҜҸдёӘзұ»йғҪжңүеҗ„иҮӘзҡ„еұһжҖ§пјҲдҫӢеҰӮposition .orientationгҖҒcolorе’Ңspeed) пјҢ 并且жүҖжңүеұһжҖ§йғҪеҝ…йЎ»еңЁз”ЁжҲ·ж“ҚзәөжёёжҲҸжқҶж—¶иҝӣиЎҢжӣҙж–°е’ҢжҳҫзӨә гҖӮ еӣ жӯӨ пјҢ жҜҸдёӘеҜ№иұЎеҝ…йЎ»е…ұдә«иҒҢиҙЈupdateе’Ң display гҖӮ PlayerзҹҘйҒ“еңЁд»Җд№Ҳж—¶еҖҷеҸ‘з”ҹдәҶжҹҗдәӣеҸҳеҢ–并且йңҖиҰҒupdateж“ҚдҪң гҖӮ е®ғе’Ңе…¶д»–еҜ№иұЎеҚҸдҪңиҺ·еҫ—ж–°зҡ„дҪҚзҪ®жҲ–ж–№еҗ‘ пјҢ дҪҶжҳҜжҜҸдёӘеҜ№иұЎжҺ§еҲ¶еҗ„иҮӘзҡ„жҳҫзӨә гҖӮ
еҚҸдҪң гҖӮ зұ»з”ЁдёҖз§ҚжҲ–дёӨз§Қж–№жі•жқҘе®һзҺ°е…¶иҒҢиҙЈ:(1пјүзұ»еҸҜд»ҘдҪҝз”Ёе…¶иҮӘиә«зҡ„ж“ҚдҪңжҺ§еҲ¶еҗ„иҮӘзҡ„еұһжҖ§ пјҢ д»ҺиҖҢе®һзҺ°зү№е®ҡзҡ„иҒҢиҙЈ;(2пјүзұ»еҸҜд»Ҙе’Ңе…¶д»–зұ»еҚҸдҪң гҖӮ жңүдәәиҝҷж ·е®ҡд№үеҚҸдҪң:
еҚҸдҪңжҳҜд»Ҙе®ўжҲ·иҒҢиҙЈе®һзҺ°зҡ„и§’еәҰиЎЁзҺ°д»Һе®ўжҲ·еҲ°жңҚеҠЎеҷЁзҡ„иҜ·жұӮ гҖӮ еҚҸдҪңжҳҜе®ўжҲ·е’ҢжңҚеҠЎеҷЁд№Ӣй—ҙеҘ‘зәҰзҡ„е…·дҪ“е®һзҺ°вҖҰвҖҰеҰӮжһңдёәдәҶе®һзҺ°жҹҗдёӘиҒҢиҙЈйңҖиҰҒеҸ‘йҖҒд»»дҪ•ж¶ҲжҒҜз»ҷеҸҰдёҖдёӘеҜ№иұЎ пјҢ жҲ‘们е°ұиҜҙиҝҷдёӘеҜ№иұЎе’Ңе…¶д»–еҜ№иұЎжңүеҚҸдҪң гҖӮ еҚ•зӢ¬зҡ„еҚҸдҪңжҳҜеҚ•еҗ‘жөҒ пјҢ еҚіиЎЁзӨәд»Һе®ўжҲ·еҲ°жңҚеҠЎеҷЁзҡ„иҜ·жұӮ гҖӮ д»Һе®ўжҲ·зҡ„и§’еәҰзңӢ пјҢ жҜҸдёӘеҚҸдҪңйғҪе’ҢжңҚеҠЎеҷЁзҡ„жҹҗдёӘзү№е®ҡиҒҢиҙЈе®һзҺ°зӣёе…і гҖӮ
иҰҒиҜҶеҲ«еҚҸдҪңеҸҜд»ҘйҖҡиҝҮзЎ®и®Өзұ»жң¬иә«жҳҜеҗҰиғҪеӨҹе®һзҺ°иҮӘиә«зҡ„жҜҸдёӘиҒҢиҙЈ гҖӮ еҰӮжһңдёҚиғҪе®һзҺ°жҜҸдёӘиҒҢиҙЈ пјҢ йӮЈд№ҲйңҖиҰҒе’Ңе…¶д»–зұ»дәӨдә’ пјҢ еӣ жӯӨе°ұиҰҒжңүеҚҸдҪң гҖӮ
дҫӢеҰӮ пјҢ иҖғиҷ‘SafeHomeзҡ„е®үе…ЁеҠҹиғҪ гҖӮ дҪңдёәжҙ»еҠЁжөҒзЁӢзҡ„дёҖйғЁеҲҶ пјҢ ControlPanelеҜ№иұЎеҝ…йЎ»зЎ®е®ҡжҳҜеҗҰеҗҜеҠЁжүҖжңүзҡ„дј ж„ҹеҷЁ пјҢ е®ҡд№үеҗҚдёәdetermine-sensor-status()зҡ„иҒҢиҙЈ гҖӮ еҰӮжһңдј ж„ҹеҷЁжҳҜејҖеҗҜзҡ„ пјҢ йӮЈд№ҲControlPanelеҝ…йЎ»и®ҫзҪ®еұһжҖ§ statusдёәвҖңжңӘеҮҶеӨҮеҘҪвҖқ гҖӮ дј ж„ҹеҷЁдҝЎжҒҜеҸҜд»Ҙд»ҺжҜҸдёӘSensorеҜ№иұЎиҺ·еҸ– пјҢ еӣ жӯӨеҸӘжңүеҪ“ControlPanelе’ҢSensorеҚҸдҪңж—¶жүҚиғҪе®һзҺ°determine-sensor-status()иҒҢиҙЈ гҖӮ
дёәеё®еҠ©иҜҶеҲ«еҚҸдҪңиҖ… пјҢ еҲҶжһҗеёҲеҸҜд»ҘжЈҖжҹҘзұ»д№Ӣй—ҙдёүз§ҚдёҚеҗҢзҡ„йҖҡз”Ёе…ізі»пјҡ( 1пјү is-part-of(жҳҜвҖҰвҖҰдёҖйғЁеҲҶпјүе…ізі»;( 2) has-knowledge-of(жңүвҖҰвҖҰзҡ„зҹҘиҜҶпјүе…ізі»;( 3 ) depends-upon(дҫқиө–вҖҰпјүе…ізі» гҖӮ еңЁдёӢйқўзҡ„ж–Үеӯ—дёӯе°Ҷз®ҖеҚ•ең°еҲҶеҲ«иҜҙжҳҺиҝҷдёүз§ҚйҖҡз”Ёе…ізі» гҖӮ
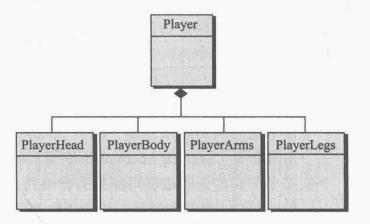
еұһдәҺжҹҗдёӘиҒҡеҗҲзұ»дёҖйғЁеҲҶзҡ„жүҖжңүзұ»еҸҜйҖҡиҝҮis-part-ofе…ізі»е’ҢиҒҡеҗҲзұ»иҝһжҺҘ гҖӮ иҖғиҷ‘еүҚйқўжҸҗеҲ°зҡ„и§Ҷйў‘жёёжҲҸдёӯжүҖе®ҡд№үзҡ„зұ» пјҢ PlayerBodyжҳҜPlayerзҡ„дёҖйғЁеҲҶ пјҢ PlayerArmsгҖҒPlayerLegsе’ҢPlayerHeadд№ҹзұ»дјј гҖӮ еңЁUMLдёӯ пјҢ дҪҝз”ЁеҰӮеӣҫжүҖзӨәзҡ„иҒҡеҗҲж–№ејҸиЎЁзӨәиҝҷдәӣе…ізі» гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
еӨҚеҗҲиҒҡеҗҲзұ»
еҪ“дёҖдёӘзұ»еҝ…йЎ»д»ҺеҸҰдёҖдёӘзұ»дёӯиҺ·еҸ–дҝЎжҒҜж—¶ пјҢ е°ұе»әз«ӢдәҶhas-knowledge-ofе…ізі» гҖӮ еүҚйқўжүҖиҜҙзҡ„determine-sensor-status()иҒҢиҙЈе°ұжҳҜhas-knowledge-ofе…ізі»зҡ„дёҖдёӘдҫӢеӯҗ гҖӮ
depends-uponе…ізі»ж„Ҹе‘ізқҖдёӨдёӘзұ»д№Ӣй—ҙе…·жңүhas-knowledge-ofе’Ңis-part-ofдёҚиғҪе®һзҺ°зҡ„дҫқиө–е…ізі» гҖӮ дҫӢеҰӮ пјҢ PlayerHeadйҖҡеёёеҝ…йЎ»иҝһжҺҘеҲ°PlayerBody(йҷӨйқһи§Ҷйў‘жёёжҲҸзү№еҲ«жҡҙзғҲ) пјҢ 然иҖҢжҜҸдёӘеҜ№иұЎе№¶жІЎжңүе…¶д»–еҜ№иұЎзҡ„зӣҙжҺҘдҝЎжҒҜ гҖӮ PlayerHeadеҜ№иұЎзҡ„center-positionеұһжҖ§з”ұPlayerBodyзҡ„дёӯеҝғдҪҚзҪ®зЎ®е®ҡ пјҢ иҜҘдҝЎжҒҜйҖҡиҝҮ第дёүж–№еҜ№иұЎPlayerиҺ·еҫ— пјҢ еҚі PlayerBodyйңҖиҰҒ Player гҖӮ еӣ жӯӨ пјҢ PlayerHeadдҫқиө–PlayerBody гҖӮ
еңЁжүҖжңүжғ…еҶөдёӢ пјҢ жҲ‘们йғҪжҠҠеҚҸдҪңзұ»зҡ„еҗҚз§°и®°еҪ•еңЁCRCжЁЎеһӢзҙўеј•еҚЎдёҠ пјҢ зҙ§йқ еңЁеҚҸдҪңзҡ„иҒҢиҙЈж—Ғиҫ№ гҖӮ еӣ жӯӨ пјҢ зҙўеј•еҚЎеҢ…еҗ«дёҖдёӘиҒҢиҙЈеҲ—иЎЁд»ҘеҸҠзӣёе…ізҡ„иғҪеӨҹе®һзҺ°иҝҷдәӣиҒҢиҙЈзҡ„еҚҸдҪң гҖӮ
еҪ“ејҖеҸ‘еҮәдёҖдёӘе®Ңж•ҙзҡ„CRCжЁЎеһӢж—¶ пјҢ еҲ©зӣҠзӣёе…іиҖ…еҸҜд»ҘдҪҝз”ЁеҰӮдёӢж–№жі•иҜ„е®ЎжЁЎеһӢ гҖӮ
1.жүҖжңүеҸӮеҠ пјҲCRCжЁЎеһӢпјүиҜ„е®Ўзҡ„дәәе‘ҳжӢҝеҲ°дёҖйғЁеҲҶCRCжЁЎеһӢзҙўеј•еҚЎ гҖӮ жӢҶеҲҶеҚҸдҪңеҚЎзүҮ(д№ҹе°ұжҳҜиҜҙжҜҸдёӘиҜ„е®Ўе‘ҳдёҚеҫ—жңүдёӨеј еӯҳеңЁеҚҸдҪңе…ізі»зҡ„еҚЎзүҮ) гҖӮ
2.еҲҶзұ»з®ЎзҗҶжүҖжңүзҡ„з”ЁдҫӢеңәжҷҜпјҲд»ҘеҸҠзӣёе…ізҡ„з”ЁдҫӢеӣҫ) гҖӮ
3.иҜ„е®Ўз»„й•ҝз»ҶиҮҙең°йҳ…иҜ»з”ЁдҫӢ гҖӮ еҪ“иҜ„е®Ўз»„й•ҝзңӢеҲ°дёҖдёӘе·Іе‘ҪеҗҚзҡ„еҜ№иұЎж—¶ пјҢ з»ҷжӢҘжңүзӣёеә”зұ»зҙўеј•еҚЎзҡ„дәәе‘ҳдёҖдёӘд»ӨзүҢ гҖӮ дҫӢеҰӮ пјҢ SafeHomeзҡ„дёҖдёӘз”ЁдҫӢеҢ…еҗ«еҰӮдёӢжҸҸиҝ°:
жҲҝдё»и§ӮеҜҹSafeHomeжҺ§еҲ¶йқўжқҝд»ҘзЎ®е®ҡзі»з»ҹжҳҜеҗҰе·Із»ҸеҮҶеӨҮжҺҘ收иҫ“е…Ҙ гҖӮ еҰӮжһңзі»з»ҹжІЎжңүеҮҶеӨҮеҘҪ пјҢ жҲҝдё»еҝ…йЎ»жүӢе·Ҙе…ій—ӯзӘ—жҲ·(й—Ёпјүд»ҘдҫҝжҢҮзӨәеҷЁе‘ҲзҺ°е°ұз»ӘзҠ¶жҖҒ гҖӮ (жңӘе°ұз»ӘжҢҮзӨәеҷЁж„Ҹе‘ізқҖжҹҗдёӘдј ж„ҹеҷЁжҳҜејҖеҗҜзҡ„ пјҢ д№ҹе°ұжҳҜиҜҙжҹҗдёӘй—ЁжҲ–зӘ—жҲ·жҳҜжү“ејҖзҡ„ гҖӮ )
жҺЁиҚҗйҳ…иҜ»



















- гҖҢж•°жҚ®жһ¶жһ„гҖҚTOGAFе»әжЁЎпјҡж•°жҚ®з”ҹе‘Ҫе‘Ёжңҹеӣҫ
- Matlab Simulink и®ҫи®ЎдёҺе»әжЁЎиҜҫзЁӢзӣҙж’ӯеүҚе…Қиҙ№иҜ•еҗ¬
- еҶ…е®№жҺЁиҚҗз®—жі•пјҡејӮжһ„иЎҢдёәеәҸеҲ—е»әжЁЎжҺўзҙў
- жҳҜж—¶еҖҷз”ЁBlenderе»әжЁЎдәҶпјҢдёҚзҹҘиҝҷеҮ дёӘзҗҶз”ұеӨҹдёҚеӨҹ
- еңЁе®¶е°ұиғҪ3DеӨҙзӣ”е»әжЁЎ HexrжҺЁеҮәе®ўеҲ¶еҢ–зЁӢеәҸ
- е…Ҙй—ЁеҲ°иҖҒжүӢе…ЁиҰҶзӣ–пјҢй”җйҫҷCPUз»ҷ3DеҲӣдҪңеҠ йҖҹ
- дҪҝз”ЁCatBoostе’ҢNODEе»әжЁЎиЎЁж јж•°жҚ®еҜ№жҜ”жөӢиҜ•
- гҖҢж•°жҚ®жһ¶жһ„гҖҚTOGAFе»әжЁЎпјҡжҰӮеҝөж•°жҚ®жЁЎеһӢеӣҫ
- зҲұдә‘иө„и®Ҝ|е…ЁиҮӘеҠЁе»әжЁЎгҖҒе…ЁиҮӘеҠЁз”ҹжҲҗ规еҲҷпјҢжҺўжҷәз«Ӣж–№пјҡдё“дёҡдәәе·ҘжҷәиғҪи§ЈеҶіж–№жЎҲжҸҗдҫӣе•Ҷ